作者:阿里哥
「控制板」能夠執行程式的計算裝置,它是機器人的控制中心,負責機器人所有計算,決策,通信和控制的功能;如同人類的腦,同時具備了類似大腦和小腦的功用、具有邏輯運算、儲存資料、分析收集到的訊息和命令致動器動作等功能,講得極端一點,沒有控制板就不是機器人,可見控制板的重要性。
機器人都需要一塊控制板,才會聰明的動起來(Source)
坊間有著各式各樣的控制板,都各自有著自己的特色和功能,而一塊適合用來玩機器人的控制板至少包含以下特色:
- 體積小:容易在塞進空間不多的機器人結構體內。
- 重量輕:機器人的重量越重就代表著需要產生更大力量的制動器來驅動,也意味著需要價格更高,並耗費更多的能量(電能,燃油等)。
- 省電:這項優點應該不需要多做解釋。
- 運算速度快:更高的控制板上晶片的運算速度,代表著機器人有能力更迅速分析由反應器接受到的訊息,並更快速的做出反應。
- 方便的無線通訊功能:無線通訊的能力能夠壤我們更方便和機器人溝通;如果可以具有聯網功能那更是可以讓機器人有著更多的可能性。
- 足夠的接腳數並支援多種通訊協議:方便應用它來聯接坊間各式各樣的感應器和制動器等輸入及輸出裝置。
- 使用門檻低:為了能更容易使用控制板,一塊低使用門檻的控制板,可以對Maker的日子好過許多。所謂的低門檻,就是當使用發生問題時,能找尋到支援的難易程度,像是:應用常見的程式語言、好的原廠技術支援、完整的參考文件、活躍的用戶社群、大量網路分享資源和參考書籍等,都能讓使用門檻降低。
- 低成本:這應該是所有玩家一致同意的特色。
信手拈來寫出一張這樣的許願表很容易。不過,要從零瑯滿目的控制板目錄中找到一塊能夠滿足這些願望的控制板,就不是一件容易的事。幸運的是,果醬機器人的好夥伴 – 承田科技(MiniPlan)搭配台灣IC設計大廠聯發科技的LinkIt 7697開發板推出了Robot shield 擴充板,直接讓我們的許願表夢想成真。
接下來讓我們仔細來看看這個對機器人控制板夢幻組合的技術規格。
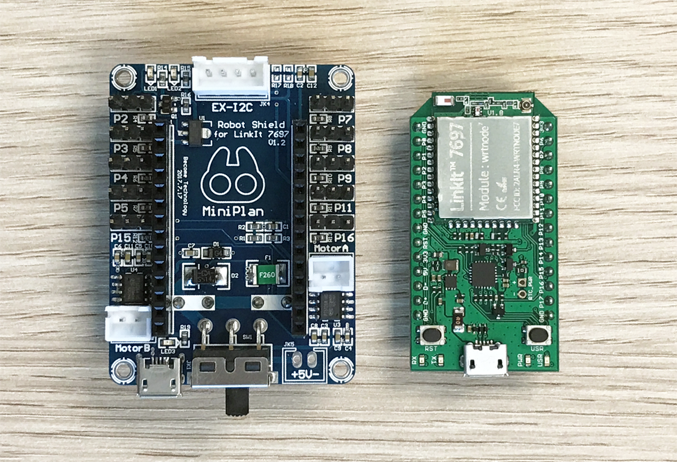
Left:Robot Shield for LinkIt 7697;Right:LinkIt 7697(圖片來源:聯發科提供)

LinkIt 7697 plugged into Robot Shield(圖片來源:聯發科提供)
聯發科技 LinkIt 7697 開發板
LinkIt 7697 開發板是聯發科 2017 年推出的最新 MT7697 家庭物聯網平台,是一片高度整合MT7697 系統單晶片SoC為核心的物聯網應用開發板。它具備高集成度和超低功耗等優點,適合家用電器、家庭自動化、小型智能設備、物聯網設備的橋接器(bridges)與連接雲端服務等多種應用。
物聯網興起之後,聯發科技透過不斷的各種系統單晶片的創新,提升在物聯網複雜情境中之處理能力。目標是提供安全、省電、客製化及便利等的晶片解決方案,同時也更重視安全的 Wi-Fi 通訊能力與建立起安全機制,來與網際網路和各種周邊連線的雲端平台。
鑒於許多開發者在建立物聯網裝置中,更需要體積小、速度快、功能強大的用戶端開發板,聯發科技的創意實驗室(Media Tek Labs)開發出LinkIt 7697這款開發板,滿足物聯網開發者需求的體積小、速度快、功能強大與易於使用的物聯網裝置。
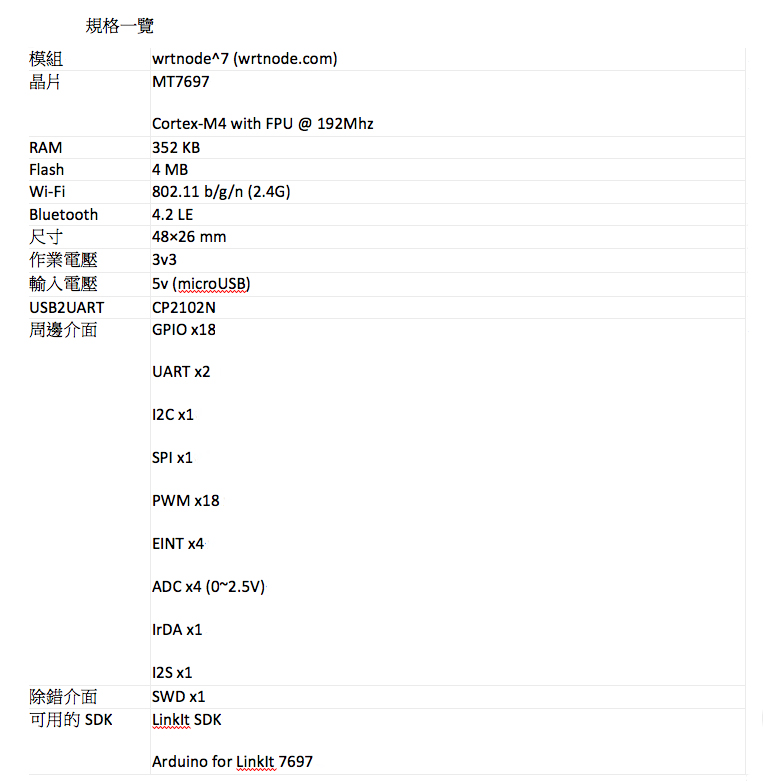
硬體規格
LinkIt 7697使用ARM的Cortex-M4F核心,是目前最廣泛被使用的處理器核心。使用這樣的晶片的好處有著上述低門檻的優點,有許多現成的範例程式、函式庫可直接拿來參考應用,網路上亦有許多活躍的用戶社群可以提供技術奧援。
LinkIt 7697 的特色包含:
- 採用 ARM ®Cortex®-M4處理器的 MT7697 系統單晶片,時脈 192MHz
- 配備352 KB RAM
- 4MB Flash外接快閃記憶體
- 支援低功耗Wi-Fi 802.11b/g/n (2.4GHz) 無線網路
- 支援Bluetooth LE (BLE))4.2 低功耗藍牙
- 支援許多週邊介面,包括:GPIO、UART、I2C、SPI、PWM、EINT、ADC、IrDA , I2S,以及嵌入式SRAM/ROM腳位
- 提供 SWD 除錯介面排針
- LinkIt SDK 開發,可支援GCC、IAR embedded workbench 或 KEIL uVision IDE。
- 可採用開放軟體開發環境FreeRTOS或Arduino IDE 來進行程式編寫。
- 內置輸出功率高達10dBm的功率放大器
7697D 則多了IEEE 802.11 a、5 GHz 頻段、雙頻 1T1R
腳位圖示Pin-out Diagram
LinkIt 7697 開發板的腳位設計非常容易來和各種各樣的控充板(Shield)連接,它提供多個 GPIO (General Purpose Input/Output)腳位能夠和許多週邊的感應器進行溝通。
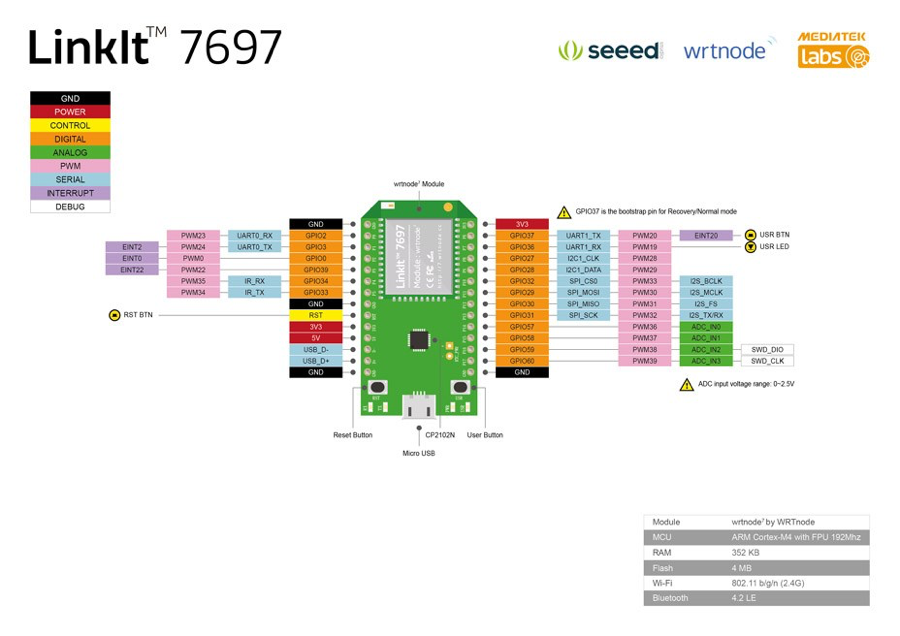
圖片來源:聯發科提供
LinkIt 7697軟體開發環境

軟體架構(圖片來源:聯發科提供)
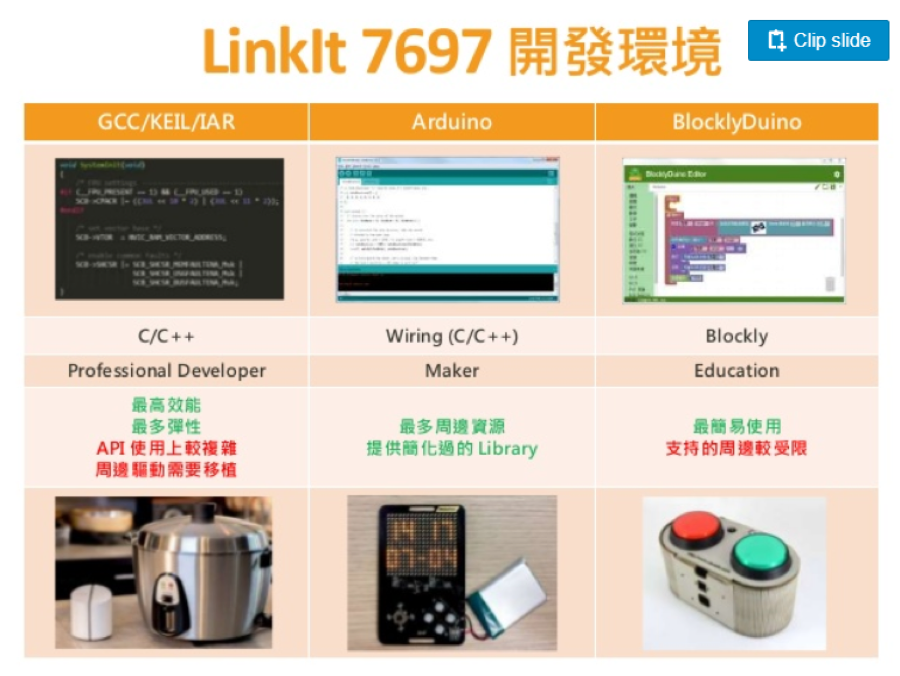
LinkIt 7697控制板提供三種軟體開發環境,使用者可依自己的需求選擇合適的環境進行程式開發,它包含了:BlocklyDuino editor、Arduino IDE、LinkIt 7697 SDK。入門的使用者可以使用BlocklyDuino圖形化的方式開發控制程式;進階的使用者應用Arduino IDE環境做程式開發;專業使用者則可使用C語言或JavaScript做程式開發。
LinkIt 7697 BlocklyDuino editor:
LinkIt 7697採用Google的Blockly為基礎的圖形化介面開發程式語言 (BlocklyDuino)。它是一套非常適合入門應用的視覺化開發工具。它可以將圖形化指令轉化成Arduino程式碼,再利用Arduino IDE寫入7697晶片,也因為可以直接轉成 Arduino code, Blockly 並不只限於 LinkIt 7697 才能使用,其他Arduino相容開發板也可以使用。
LinkIt 7697採用Google的Blockly為基礎的圖形化介面開發程式語言 (BlocklyDuino)。它是一套非常適合入門應用的視覺化開發工具。它可以將圖形化指令轉化成Arduino程式碼,再利用Arduino IDE寫入7697晶片,也因為可以直接轉成 Arduino code, Blockly 並不只限於 LinkIt 7697 才能使用,其他Arduino相容開發板也可以使用。
BlocklyDuino也提供一個友善的程式編輯環境,可以讓入門者能更容易並學習開發LinkIt 7697,除了具備了圖形化介面、相關周邊如各種感測器的指令,還有Wi-Fi / BLE / 雲端服務的指令也都完整包含在裏頭;使用BlocklyDuino完成程式撰寫後,開發環境能夠自動轉譯成為其他語言的程式碼,如Arduino, JavaScript、Python、PHP、Lua與Dart等,非常方便並適合入門學習。
Arduino IDE:
LinkIt 7697也支援Arduino開發環境,能直接使用Arduino IDE進行程式開發。這對機器人玩家及創客們尤其具有吸引力。
LinkIt 7697也支援Arduino開發環境,能直接使用Arduino IDE進行程式開發。這對機器人玩家及創客們尤其具有吸引力。
LinkIt 7697 SDK:
聯發科亦提供LinkIt 7697 SDK讓使用者可以用來編譯C/C++原始碼,適合專業程式開發應用,需要在GNU的環境下進行。使用者可以透過聯發科提供的 LinkIt SDK 搭配 GCC、IAR embedded workbench 或是 KEIL uVision 等編譯器來開發應用程式,而它需要在GNU的環境下進行編譯。
聯發科亦提供LinkIt 7697 SDK讓使用者可以用來編譯C/C++原始碼,適合專業程式開發應用,需要在GNU的環境下進行。使用者可以透過聯發科提供的 LinkIt SDK 搭配 GCC、IAR embedded workbench 或是 KEIL uVision 等編譯器來開發應用程式,而它需要在GNU的環境下進行編譯。
LinkIt 7697同時也支援JavaScript語言,這對於已經習慣使用JavaScript開發Internet前端(瀏覽器)、後端程式語言(伺服器)的人來說相當方便,不必再另外學習其他程式語言,就能開發出LinkIt 7697的控制程式。
開發環境(圖片來源:聯發科提供)
Robot Shield
Robot Shield for LinkIt 7697由開發MiniPlan及TinyPlan的承田科技設計開發,結合了LinkIt 7697強大的功能,使玩家們能夠輕鬆構建各種機器人應用。承襲TinyPlan對使用者極度友善的硬體設計風格,Robot Shield 同樣的把擴充板、電源控制板和電池整合在一塊精巧的電路板上。搭載上LinkIt 7697 開發板後,不需要煩惱控制板間線路對接和電池等問題,就是一套完整可以直接使用的控制單元。
接下來若把注意力轉移到板上在接腳的規劃上,那更是讓機器人玩家躍躍欲試。十組的GPIO,最多可以連接十顆伺服機,更厲害的是板上準備了兩組馬達專用的接腳,這樣的接腳搭配讓機器人設計增加了許多的可能性。
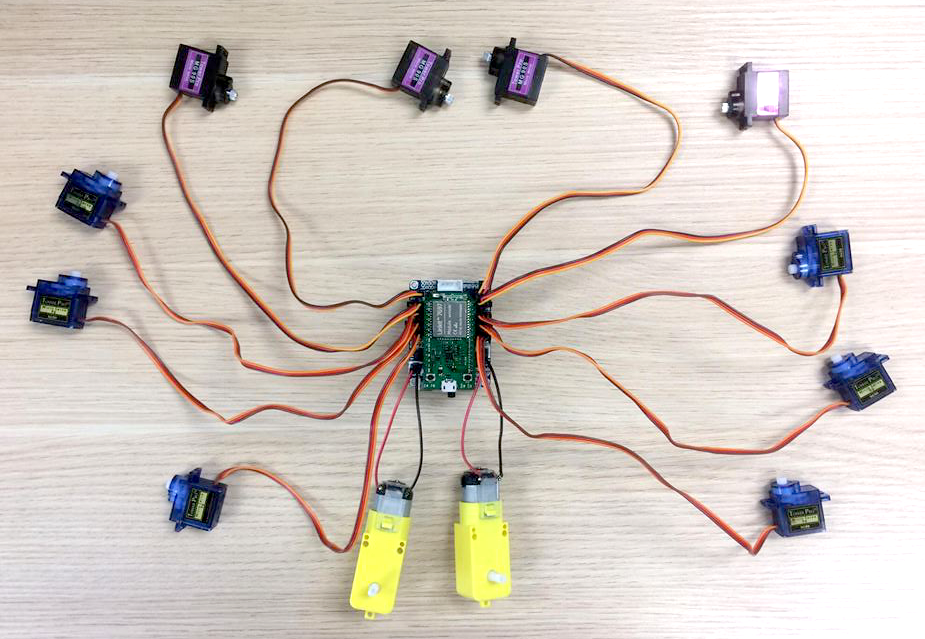
Robot Shield具備高擴充性(Source)
 Robot Shield規格
Robot Shield規格
- 10 組 PWM 可以用來控制10顆伺服機(Servo)
- 2 組馬達控制
- 1 組I2C extension socket
- 板載250 mAh 電池組 (Lithium Capacitor)
- Higher output (2.5A)to drive more servos and motors
- Faster recharge (5V/2.5A)
- Longer life cycle (3000 times rechargeable)
- Safer, do not explode
- 精簡all-in-one設計 (Length / Width / Height)
結語
LinkIt 7697 + Robot Shield滿足了我們在文章開頭提到對機器人控制板所有的期待。這樣功能強大、設計精巧,價格又親民的組合,非常推薦有興趣的玩家們可以在工具箱中增加這組套件。
(責任編輯:葉于甄)





留言
張貼留言